 Dokumente & Veröffentlichungen Dokumente & Veröffentlichungen |
|
Der Einsatz von multimodalen Mehrkamerasystemen zur Erfassung von 3D-Daten ist im Bereich der Robotik und MRK weit verbreitet.
In diesen Anwendungen müssen vielfach multimodale (2D, 3D) Sensordaten geometrisch
registriert und fusioniert sowie Elemente der Aufnahmeanordnung und weitere Szenenobjekte korrekt im Raum verortet werden. Dabei spielen Methoden der geometrischen Kalibrierung von Kameras unterschiedlicher
Modalitäten sowie von Szenenkomponenten, wie Robotern, Targets, eine herausragende Rolle.
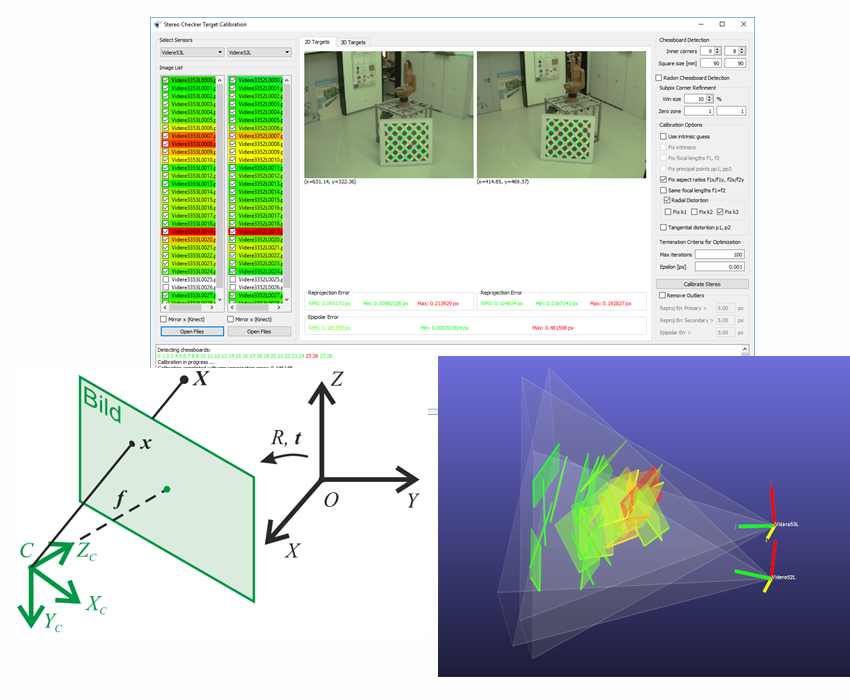
Zur nutzerfreundlichen, universellen Umsetzung unterschiedlicher Aufgaben der geometrischen Kalibrierung in verschiedenen Anwendungen
wurde das modulare Software-Toolkit 3D-EasyCalib entwickelt. Es bietet eine Vielzahl von Hilfsmitteln zur Analyse des Kalibrierproblems und zur Umsetzung dieses Verarbeitungsschritts.
|
 3D-EasyCalib 2.9.14 3D-EasyCalib 2.9.14
|
| for Windows 7, 8, 10 |

|
|
|
|
 Dokumente & Veröffentlichungen Dokumente & Veröffentlichungen |
Darko Vehar, Rico Nestler, Karl-Heinz Franke: "3D-EasyCalib Toolkit zur geometrischen Kalibrierung von Kameras und Robotern"
22. Anwendungsbezogener Workshop zur Erfassung, Modellierung, Verarbeitung und Auswertung von 3D-Daten "3D-NordOst",
GFaI Gesellschaft zur Förderung angewandter Informatik e. V. Berlin, S. 15 ff., ISBN: 978-3-942709-24-8, Dezember 2019.
|
deutsch
 english
english
|
|

















